2.6. Adversarial Patch Attacks#
In this notebook we will experiment with adversarial patch attacks against a DNN pretrained on ImageNet from robustbench, exploring how the patch can be easily constructed using SecML-Torch. We aim to have the image of a sports car misclassified, using the \(l_∞\) untargeted implementation of PGD-patch Melis et al. [2017], a varient of the PGD attack, where using a box constraint the perturbations are restricted to a specific region of the image.
%%capture
try:
import secmlt
except ImportError:
%pip install secml-torch[foolbox,adv_lib]
%%capture
import torch
import torchvision.datasets
from torchvision.models import get_model
from secmlt.metrics.classification import Accuracy
from secmlt.models.pytorch.base_pytorch_nn import BasePyTorchClassifier
from torch.utils.data import DataLoader, Subset, TensorDataset
import requests, io
from PIL import Image
import torchvision.transforms as T
import json
import matplotlib.pyplot as plt
from secmlt.adv.backends import Backends
from secmlt.adv.evasion.perturbation_models import LpPerturbationModels
from secmlt.adv.evasion.pgd import PGD
from secmlt.optimization.constraints import MaskConstraint
2.6.1. Loading Pre-trained Model and Dataset#
First, we start by loading a pretrained model, and we pass it to the SecML-Torch wrapper. The ImageNet labels are then loaded and we download a sample image, prepare it for inference and create a dataset loader for it, as the PGD class instance expects a dataset loader when running the attack.
%%capture
device = 'cuda' if torch.cuda.is_available() else 'cpu'
net = get_model("vit_b_16", weights="IMAGENET1K_V1")
device = "cpu"
net.to(device)
# Wrap the model with SecML-Torch's BasePyTorchClassifier
clf = BasePyTorchClassifier(net, preprocessing=T.Normalize((0.4914, 0.4822, 0.4465), (0.2023, 0.1994, 0.2010)))
labels_url = (
"https://raw.githubusercontent.com/"
"anishathalye/imagenet-simple-labels/master/"
"imagenet-simple-labels.json"
)
r = requests.get(labels_url)
imagenet_labels = json.loads(r.text)
img_url = "https://www.kimballstock.com/images/car-stock-photos/toyota-stock-photos.jpg"
r = requests.get(img_url)
img = Image.open(io.BytesIO(r.content)).convert("RGB")
transform = T.Compose([
T.Resize(256),
T.CenterCrop(224),
T.ToTensor(),
])
img = transform(img).unsqueeze(0)
test_ds = TensorDataset(
img,
torch.tensor([imagenet_labels.index("sports car")])
)
test_loader = DataLoader(test_ds, batch_size=1, shuffle=False)
We show the image and the predicted label by the model
pred_label = imagenet_labels[clf.predict(img.to(device)).item()]
plt.imshow(img.squeeze().permute(1, 2, 0))
plt.title(pred_label)
plt.axis('off')
plt.show()

2.6.2. Running the attack#
We instantiate the attack instance using our attack parameters, as shown in previous tutorials. However, we further modify the perturbation constraints to account for the box constraint in our PGD-patch attack. This can be done by creating a mask tensor where only the region which we want to modify has values 1.0, this allows us to constraint the perturbations to that specific region (i.e., patch). We choose the patch region to be around the license plate of the car.
Note that the PGD-patch attack may take some time to run depending on the machine.
epsilon = 0.8
steps = 10
step_size = 1e-2
pertubation_norm = LpPerturbationModels.LINF
pgd = PGD(
perturbation_model=pertubation_norm,
epsilon=epsilon,
num_steps=steps,
step_size=step_size,
random_start=False,
backend=Backends.NATIVE,
lb=0.0, ub=1.0,
)
x_batch, _ = next(iter(test_loader))
B, C, H, W = x_batch.shape
x_lb, x_ub, y_lb, y_ub = 140, 160, 50, 170
mask = torch.zeros(C, H, W, device=x_batch.device)
mask[:, x_lb:x_ub, y_lb:y_ub] = 1.0
pgd.manipulation_function.perturbation_constraints.append(MaskConstraint(mask))
acc_clean = Accuracy()(clf, test_loader)
adv_loader = pgd(clf, test_loader)
acc_adv = Accuracy()(clf, adv_loader)
print(f"Clean Accuracy. : {acc_clean:.3f}")
print(f"Robust Accuracy. : {acc_adv:.3f}")
print(f"Accuracy Drop. : {acc_clean - acc_adv:.3f}")
Clean Accuracy. : 1.000
Robust Accuracy. : 0.000
Accuracy Drop. : 1.000
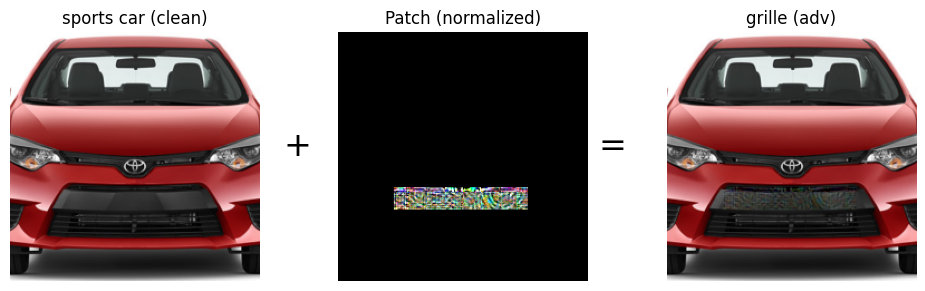
2.6.3. Adversarial Patch Visualization#
import matplotlib.pyplot as plt
import numpy as np
# --- grab the same sample from clean and adversarial loaders ---
x_clean_b, y_clean_b = next(iter(test_loader))
x_adv_b, y_adv_b = next(iter(adv_loader))
idx = 0
x_clean = x_clean_b[idx].detach().cpu() # [C,H,W]
x_adv = x_adv_b[idx].detach().cpu() # [C,H,W]
# --- predicted labels for titles ---
device = next(net.parameters()).device
with torch.no_grad():
pred_clean = int(net(x_clean.unsqueeze(0).to(device)).argmax(dim=1).item())
pred_adv = int(net(x_adv.unsqueeze(0).to(device)).argmax(dim=1).item())
label_clean = f"{imagenet_labels[pred_clean]} (clean)"
label_adv = f"{imagenet_labels[pred_adv]} (adv)"
# --- patch coordinates ---
# x_lb, x_ub, y_lb, y_ub = 140, 160, 50, 170 # e.g., [140:160, 50:170]
# --- build the patch-only perturbation visualization on a WHITE background ---
C, H, W = x_clean.shape
delta = (x_adv - x_clean) # [C,H,W]
# normalize the patch perturbations
patch = delta[:, x_lb:x_ub, y_lb:y_ub] # [C,k,k]
dmin, dmax = float(patch.min()), float(patch.max())
patch_norm = (patch - dmin) / (dmax - dmin + 1e-8) # [C,k,k] in [0,1]
# white background + paste normalized patch
patch_viz = np.zeros((H, W, 3), dtype=np.float32)
patch_viz[x_lb:x_ub, y_lb:y_ub, :] = patch_norm.permute(1, 2, 0).numpy()
# convert clean/adv to HxWxC np arrays for imshow
clean_img = x_clean.permute(1,2,0).clamp(0,1).numpy()
adv_img = x_adv.permute(1,2,0).clamp(0,1).numpy()
# --- plot: clean | patch | = | adv ---
fig, axes = plt.subplots(1, 3, figsize=(10, 3))
axes[0].imshow(clean_img); axes[0].set_title(label_clean); axes[0].axis("off")
axes[1].imshow(patch_viz); axes[1].set_title("Patch (normalized)"); axes[1].axis("off")
axes[2].imshow(adv_img); axes[2].set_title(label_adv); axes[2].axis("off")
fig.text(0.335, 0.5, "+", fontsize=24, ha="center", va="center")
fig.text(0.65, 0.5, "=", fontsize=24, ha="center", va="center")
plt.tight_layout()
plt.show()
Marco Melis, Ambra Demontis, Battista Biggio, Gavin Brown, Giorgio Fumera, and Fabio Roli. Is deep learning safe for robot vision? adversarial examples against the icub humanoid. In Proceedings of the IEEE international conference on computer vision workshops, 751–759. 2017.